Carr-Purcell-Meiboom-Gill パルスシーケンス
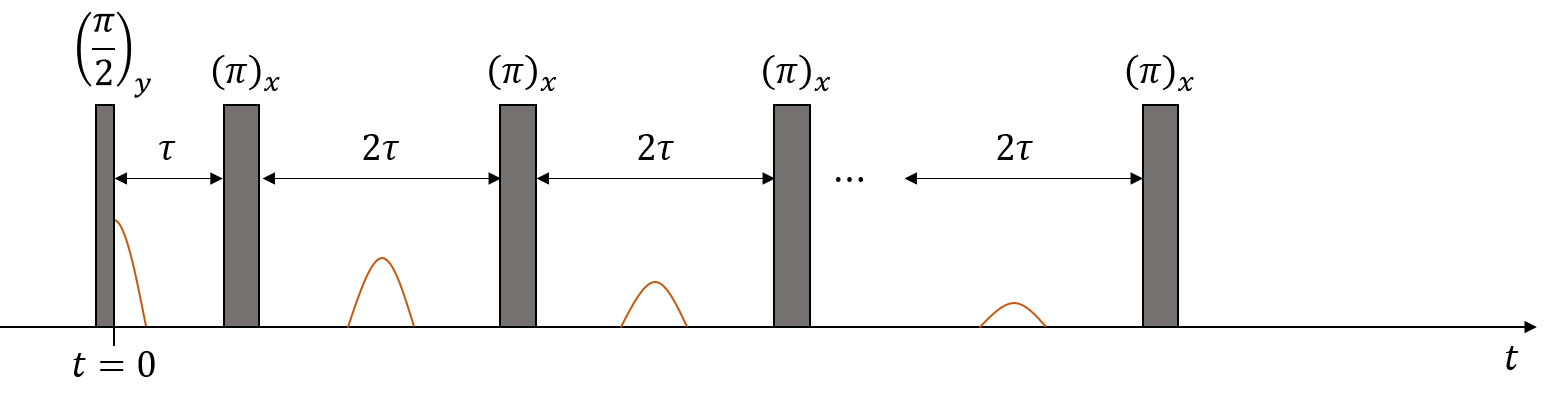
Carr-Purcell-Meiboom-Gill によって提案されたパルスシーケンスは、スピン共鳴実験において \(T_2\) を一回のシーケンスで測定するためのパルスシーケンスとして提案された。以下のようなパルスを用いる。
オレンジの線は得られるスピン信号を表している。基本的にはHahn エコー (通常のスピンエコーシーケンス) を発展させたパルス系列であり、Hahn エコーと同じように、\(I_z\) に関するコヒーレントエラー (共鳴周波数の時間的に変動しないずれ) を復元する力を持つ。各 \(\pi\) パルスのちょうど中間に、エコー信号が観測される。\(\tau\) 秒ごとに \(I_z\) のエラーが無かったことにできるので、最近では量子情報実験などでコヒーレンス時間を伸ばす用途にも頻繁に用いられる。
通常観測される信号強度は \(\pi\) パルスの回数 \(n\) に対して指数関数的に減少するが、この減衰の時定数は「CPMGにおける横緩和時間 (\(T_2\))」とも呼ばれ、\(T_2^{\text{CPMG}}\) と書かれることもある。共鳴周波数の時間的変動が「連続的」に起こっているならば、普通 CPMG の \(T_2\) は単純なスピンエコー (Hahn エコー) の \(T_2\) よりも長くなる。直感的にはこれは、通常のエコーでは反転パルスを一回しか打たないために、エコー時間 \(\tau\) の間の共鳴周波数がずれが \(\tau\) が大きくなるにつれて大きくなる一方で、CPMG では短い時間ごとに反転パルスを打つことによってこの影響を排除できるからだと説明できる。また、共鳴周波数が時間 \(t\) に対して線形に増加するような場合にも、全てのパルス間隔が等しく \(2\tau\) ならば、スピンを refocus できることが知られている。 (このページではこれらのことについて詳しい説明はしないので、気になる方は原論文[Carr and Purcell, Phys. Rev. 94, 630 (1954)] を参照。)
記号の準備
この記事では以下の記号を使う。
| x,y,z方向のスピン演算子 |
\(I_x, I_y, I_z\) |
| スピン量子数 |
\(S\) |
| \(2S+1\)次元の恒等演算子 |
\(I\) |
考えるモデル
上にも述べた通り、CPMG シーケンスは \(I_z\) に関するコヒーレントエラーを復元する手法である。\(I_z\) に関するコヒーレントエラーとは、以下のような場合に誘起されるエラーのことを言う。
- 単一種類の独立に運動するスピンのアンサンブルを考え、それぞれが微妙に異なる (時間に依存しない) 静磁場を感じている場合。
- スピンと環境の相互作用が \(I_z\otimes A\) の形で表される場合。
Hahnエコーのページで上記2つの場合についてどちらも計算して、同じ結果が得られることを確かめているので、このページでは一つ目の場合のみについて考える。
なお、このページでは \(\pi/2\) パルス・ \(\pi\) パルスは瞬間的に行われ、この操作にかかる時間は無視できると仮定する。また、使う記号を以下のように定義する。
|
| 中心周波数 |
\(\omega_0\) |
| \(i\)番目のスピンの中心周波数からのずれ |
\(\delta \omega_i\) |
| スピンの個数 |
\(N\) |
つまり、\(\omega_0\) で回転する座標系からみると、\(i\) 番目のスピンが感じるハミルトニアンは
\[H_i = \delta\omega_i I_z\]
である。
またそれぞれのスピンは初期状態として
\[\rho_0 = \frac{I}{2S+1}+\epsilon I_z \]
をもっているとする。恒等演算子 \(I\) は何をしても変化しないので、このページでは \(I_z\) の変化だけを追うことにしよう。そこで密度演算子も
\[\rho_0 = I_z \]
のように略記することにする。
Carr-Purcell シーケンス
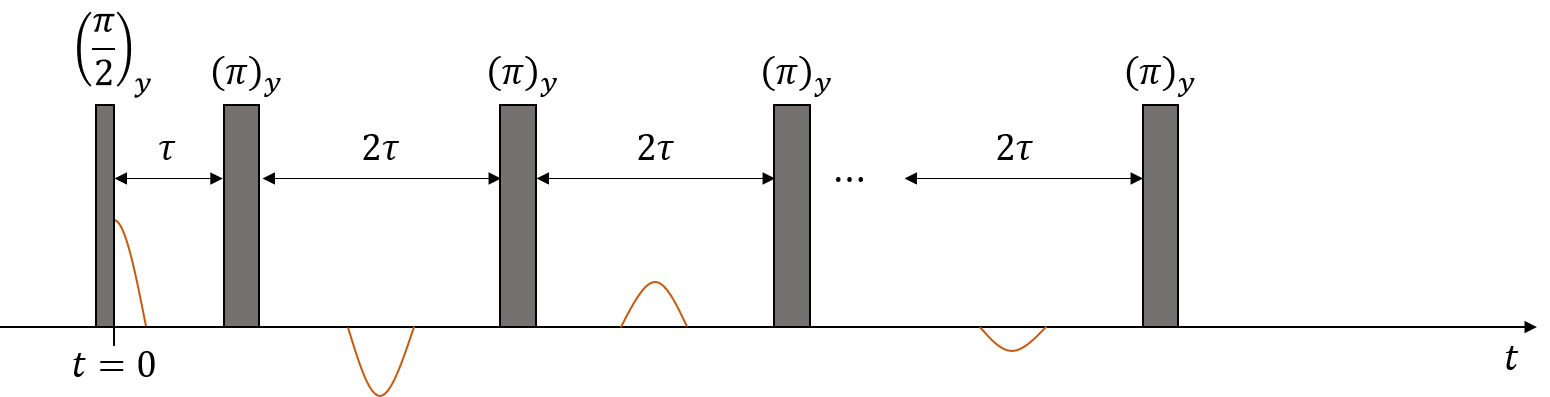
さて、本題である CPMG の説明に入る前に、まずは CPMG のもととなった Carr-Purcell (CP) シーケンスから説明する。CP シーケンスは以下のように、CPMG に対して \(\pi\) パルスの位相だけが異なるシーケンスである。
実は、CP パルスは \(\pi\) パルスの角度に誤差 (\(\pi\) でなくて \(\pi+\epsilon\)になってしまうみたいなこと) があると、その誤差がパルスを打つたびに蓄積してしまうことがわかっている。したがって CP パルスで「良い」結果を得るためには非常にシビアなパルス強度・時間の調整が必要となるのだが、CPMG は \(\pi\) パルスの位相を90度ずらすことで、この誤差の蓄積を少なくするように工夫し、実験をやりやすくしたシーケンスとなっている。これを理解するために、ここでは最初に CP パルスについて紹介する。
さて、まずは理想的な \(\pi\) パルスを照射できると仮定して、CP パルス下のスピンの動きを見てみよう。最初の \(\pi/2\) パルスで \(I_z\) は
\[\to I_x \]
に変換される。(共鳴周波数が異なるため全てのスピンを完全に \(I_x\) とすることはできないが、十分強いラビ周波数でパルス照射すれば、良い精度で \(I_x\) とすることは可能である。)
その後 \(\tau\) の間、それぞれのスピンは \(H_i\) によって独立に運動する。よって系の状態は
\begin{align}
&\to e^{-i\delta\omega_i I_z \tau} I_x e^{i\delta\omega_i I_z \tau}\\
&= \cos (\delta\omega_i \tau) I_x + \sin (\delta\omega_i\tau) I_y
\end{align}
のアンサンブルとなる。それぞれのスピンがxy平面内で違う方向を向き始めるので、得られる信号は小さくなっていってしまう。(これが俗にいう \(T_2\) 緩和である。)
ここに 1 つめの \(y\) 軸まわりの \(\pi\) パルスがかかる。\(I_x\) は反転し \(I_y\) は変化しないので、\(\pi\) パルス後は
\begin{align}
&\to -\cos (\delta\omega_i \tau) I_x + \sin (\delta\omega_i\tau) I_y \\
&= - e^{i\delta\omega_i I_z \tau} I_x e^{-i\delta\omega_i I_z \tau}
\end{align}
となる。
Hahnエコーと同じように、実効的にこれまでの時間発展を逆転させることができていることに注目しよう。
その後 \(\tau\) の間時間発展させると
\begin{align}
&-e^{-i\delta\omega_i I_z \tau} e^{i\delta\omega_i I_z \tau} I_x e^{-i\delta\omega_i I_z \tau}e^{i\delta\omega_i I_z \tau} \\
&= - I_x
\end{align}
となり、各スピンごとにずれていた位相がもとに戻されて、全てのスピンが \(I_x\) 成分だけを持つようになる。ただし、このとき係数が \(-1\) になっていてスピンは \(-x\) 方向を向いていることに注意したい。この後はこの繰り返しで、\(x\) 方向と \(-x\) 方向を振動しながら、\(2\tau\) ごとにエコー信号が観測されるのだ。
Carr-Purcellシーケンスの実験的問題点
CP パルスの動作原理がわかったところで、\(\pi\) パルスに誤差があって、\(\pi+\epsilon\) という角度になってしまっている場合を考えよう。\(\pi/2\) パルスのあと、
\begin{align}
\cos (\delta\omega_i \tau) I_x + \sin (\delta\omega_i\tau) I_y
\end{align}
となるところまでは同じだが、次に \(y\) 軸周りの \(\pi\) パルスを照射すると、誤差 \(\epsilon\) のせいで、
\begin{align}
&\to \cos (\delta\omega_i \tau)[\cos(\pi+\epsilon) I_x + \sin(\pi+\epsilon)I_z] + \sin (\delta\omega_i\tau) I_y\\
&= \cos (\delta\omega_i \tau)[-\cos\epsilon~I_x - \sin\epsilon~I_z] + \sin (\delta\omega_i\tau) I_y\\
&= - \cos (\delta\omega_i \tau)I_x + \sin (\delta\omega_i\tau) I_y + \cos (\delta\omega_i \tau)[(1-\cos\epsilon)I_x -\sin\epsilon~I_z]
\end{align}
となる。\(\epsilon\) の誤差のせいで、\(z\) 軸成分 (\(I_z\)) などいらない項が混ざってしまっていることがわかる。もうすでに式がややこしくなってきているので、\(\epsilon\) の一次の項だけを取ってくることにして、上の式を
\begin{align}
&= - \cos (\delta\omega_i \tau)I_x + \sin (\delta\omega_i\tau) I_y - \epsilon\cos (\delta\omega_i \tau)~I_z + O(\epsilon^2)\\
\end{align}
と書こう。このあと \(e^{-i\delta\omega_i I_z \tau}\) で時間発展させると、
\begin{align}
&\to - I_x - \epsilon\cos (\delta\omega_i \tau)~I_z + O(\epsilon^2)
\end{align}
となり、最初の項はさっきと全く同じようにに \(I_x\) に復元されるものの、\(\epsilon\) の誤差によって生まれた \(I_z\) 成分は取り除くことができない。
さて、この後次の \(\pi\) パルスまで、もう一度 \(e^{-i\delta\omega_i I_z \tau}\) で時間発展が行われる。それによって、
\begin{align}
\to &- e^{-i\delta\omega_i I_z \tau} I_x e^{i\delta\omega_i I_z \tau} -\epsilon\cos (\delta\omega_i \tau)~I_z+ O(\epsilon^2)
\end{align}
と変換される。この後もう一度 \(\pi+\epsilon\) パルスが \(y\) 軸回りに照射されると、
\begin{align}
\to & e^{i\delta\omega_i I_z \tau} I_x e^{-i\delta\omega_i I_z \tau} - \cos (\delta\omega_i \tau)[(1-\cos\epsilon)I_x -\sin\epsilon~I_z] \\
& -\epsilon\cos (\delta\omega_i \tau)~[-\sin \epsilon~I_x - \cos\epsilon I_z ]+ O(\epsilon^2)
\end{align}
さきほどと同様に \(\epsilon\) に関して 1 次の項だけ取ってくると、
\begin{align}
= & e^{i\delta\omega_i I_z \tau} I_x e^{-i\delta\omega_i I_z \tau} + 2\epsilon\cos(\delta\omega_i \tau)~I_z + O(\epsilon^2)
\end{align}
となり、一回目のパルスでは \(\epsilon\) だった \(z\) 成分が、二回目のパルスでは \(2\epsilon\) と、2倍に増えてしまっている。簡単に想像できるように、この後もパルスごとに \(\epsilon\), \(2\epsilon\), \(3\epsilon\),... とどんどんと蓄積されていってしまう。\(\epsilon\) の一次の項だけ取ってきているので分かりにくくなってしまっているかもしれないが、\(z\) 成分が増えたその分、もちろん \(xy\) 平面の成分は (\(\epsilon^2\) のオーダーで) 減ってしまう。実験では \(\pi\) パルスだと思っていたものが \(\pi+\epsilon\) パルスだったということは日常茶飯事なので、これは問題である。
CPMG シーケンス
Meiboom と Gill は、\(\pi\) パルスの位相を90度ずらすことで、この誤差の蓄積が抑えられることを発見した。パルスシーケンスはこのページの最初に載せているが、ここでも再掲する。
CP シーケンスでは \(\pi\) パルスが \(y\) 軸回りだったが、CPMG パルスでは \(x\) 軸回りとしていることに注意しよう。
まずこのパルスシーケンスの働きを見るために、理想的な \(\pi\) パルスを打てているときどのような動きをするか計算してみよう。まず最初の \(\pi/2\) パルスによって \(I_z\) が \(I_x\) に変換される。その後 \(\tau\) の時間で
\begin{align}
&\to e^{-i\delta\omega_i I_z \tau} I_x e^{i\delta\omega_i I_z \tau}\\
&= \cos (\delta\omega_i \tau) I_x + \sin (\delta\omega_i\tau) I_y
\end{align}
となる。その後 \(x\) 軸まわりに \(\pi\) 回転させると、\(I_y\) だけが反転し、
\begin{align}
&\to \cos (\delta\omega_i \tau) I_x - \sin (\delta\omega_i\tau) I_y \\
&= e^{i\delta\omega_i I_z \tau} I_x e^{-i\delta\omega_i I_z \tau}
\end{align}
となる。もう一度 \(\tau\) 時間発展させれば、
\begin{align}
&\to e^{-i\delta\omega_i I_z \tau}e^{i\delta\omega_i I_z \tau} I_x e^{-i\delta\omega_i I_z \tau}e^{i\delta\omega_i I_z \tau} \\
&= I_x
\end{align}
と、 \(I_z\) による時間発展がキャンセルされ、\(I_x\) へと戻ってくる。CP シーケンスでは一回目の \(\pi\) パルスの後 \(-x\) 方向を向いていたが、CPMG では \(+x\) 方向を向いていることにも注意しよう。この後はこの繰り返しで毎 \(2\tau\) ごとに \(I_x\) へと refocus される。
CPMG シーケンスのメリット
これで CPMG シーケンスでスピンがどのように動くか説明できたので、最後に CPMG シーケンスの \(\pi\) パルスの誤差に対する耐性について説明して終わりにしよう。CP のときと同じように、\(\pi\) パルスが \(\pi+\epsilon\) パルスになってしまったときどうなるか、について議論する。
この場合でも、まず最初の \(\pi/2\) パルスによって \(I_z\) が \(I_x\) に変換され、その後 \(\tau\) の時間で
\begin{align}
&\to e^{-i\delta\omega_i I_z \tau} I_x e^{i\delta\omega_i I_z \tau}\\
&= \cos (\delta\omega_i \tau) I_x + \sin (\delta\omega_i\tau) I_y
\end{align}
と発展するところまでは同じである。この後 \(x\) 軸まわりに \(\pi+\epsilon\) パルスが照射される。すると、
\begin{align}
&\to \cos (\delta\omega_i \tau) I_x + \sin (\delta\omega_i\tau) [\cos(\pi + \epsilon) I_y + \sin(\pi + \epsilon) I_z]\\
&= \cos (\delta\omega_i \tau) I_x - \sin (\delta\omega_i\tau) [\cos\epsilon ~ I_y + \sin \epsilon~I_z]\\
&= \cos (\delta\omega_i \tau) I_x - \sin (\delta\omega_i\tau) I_y - \sin (\delta\omega_i\tau) [(1-\cos\epsilon) I_y + \sin \epsilon~I_z]
\end{align}
となる。さらに先程と同じように \(\epsilon\) の1次の項だけとると
\begin{align}
&= e^{i\delta\omega_i \tau} I_x e^{-i\delta\omega_i \tau} - \epsilon \sin (\delta\omega_i\tau) I_z + O(\epsilon^2)
\end{align}
となる。ここでは \(\epsilon\) の一次で \(I_z\) が混ざってしまっており、CP と同じじゃないかと思われるかもしれないが、CPMG では次のパルスでこの項がうまくキャンセルされる。さて、このあと \(2\tau\) 後に次の \(\pi+\epsilon\) パルスが加わるが、その直前の状態は
\begin{align}
&= e^{-i\delta\omega_i \tau} I_x e^{i\delta\omega_i \tau} - \epsilon \sin (\delta\omega_i\tau) I_z + O(\epsilon^2)
\end{align}
である。ここに \(\pi+\epsilon\) パルスが \(x\) 軸回りに加わると、
\begin{align}
\to &\cos (\delta\omega_i \tau) I_x - \sin (\delta\omega_i\tau) I_y - \sin (\delta\omega_i\tau) [(1-\cos\epsilon) I_y + \sin \epsilon~I_z] \\
& - \epsilon \sin (\delta\omega_i\tau) (\sin(\pi+ \epsilon) I_x + \cos(\pi+ \epsilon) I_z) + O(\epsilon^2)\\
= &\cos (\delta\omega_i \tau) I_x - \sin (\delta\omega_i\tau) I_y - \sin (\delta\omega_i\tau) [(1-\cos\epsilon) I_y + \sin \epsilon~I_z] \\
& + \epsilon \sin (\delta\omega_i\tau) (\sin\epsilon~I_x + \cos\epsilon~I_z) + O(\epsilon^2)
\end{align}
\(\epsilon\) の一次の項だけを取ってくると、ちょうど前回の \(\pi\) パルスで生み出された \(I_z\) 成分と今回の \(\pi\) パルスで生み出された \(I_z\) 成分が相殺して、
\begin{align}
&= e^{-i\delta\omega_i \tau} I_x e^{i\delta\omega_i \tau} + O(\epsilon^2)
\end{align}
となる。 CP パルスの場合には \(\epsilon\), \(2\epsilon\), \(3\epsilon\),... と誤差が蓄積されてしまっていたが、CPMG パルスの場合には偶数回目のパルスで毎回キャンセルされることがわかる。実験では常に誤差が伴うので、これはとても嬉しい改善点であり、おそらく CPMG パルスが頻繁に使われる大きな要因となっているのだと思う。